提示:看这篇文章前,先看这篇基础扫盲贴 http://www.geek-workshop.com/
thread-2322-1-1.html
总述
红外遥控由发送和接收两个组成部分。发送端采用单片机将待发送的
二进制信号
编码调制为一系列的脉冲串信号,通过红外发射管发射红外信号。红外接收完成对红外信号的接收、放大、检波、整形,并解调出遥控编码脉冲。为了减少干扰,采用的是价格便宜性能可靠的一体化红外接收头(
HS0038,它接收红外信号频率为 38kHz,周期约 26μs,采用NEC红外编码) 接收红外信号,它同时对信号进行放大、检波、整形得到 TTL 电平的编码信号,再送给单片机,经单片机解码并执行去控制相关对象。如图 1 所示:
 红外发射和接收组成电路
红外发射和接收组成电路
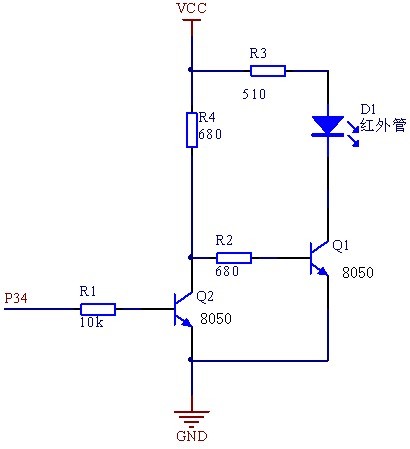
发射电路
接收电路
调制与发射
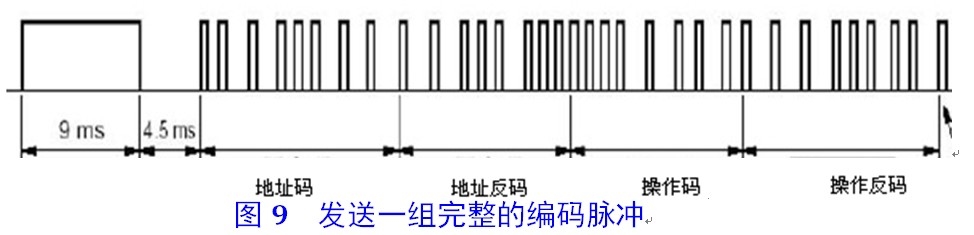
红外遥控发射芯片采用PPM 编码方式,当发射器按键按下后,将发射一组 110ms 的编码脉冲。
遥控编码脉冲由前导码、16 位用户码(8 位用户码、8 位用户码的反码)和 16 位操作码(8 位操作码、8 位操作码的反码)组成。
前导码的作用:前导码是一个遥控码的起始部分,由一个 9ms 的高电平 (起始码) 和一个 4.5ms 的低电平 (结果码) 组成。
用户码的作用:16 位用户码(8 位用户码、8 位用户码的反码),通过对用户码的检验,每个遥控器只能控制一个设备动作,这样可以有效地防止多个设备之间的干扰。编码后面还要有编码的反码,用来检验编码接收的正确性,防止误操作,增强系统的可靠性。
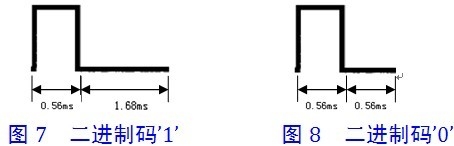
0和1的表示:0和1均以0.56ms的高电平开始(实际测量是500us的样子),不同的是后面出现的低电平,如果低电平是0.56ms(实际测量是500us的样子),则表示0,如果低电平是1.68ms(0.56*3=1.68)则表示1。
二进制信号的调制由单片机来完成,它把编码后的二进制信号调制成频率为38kHz 的间断脉冲串(周期约26us的脉冲),相当于用二进制信号的编码乘以频率为 38kHz 的脉冲信号得到的间断脉冲串,即是调制后用于红外发射二极管发送的信号,如图 4 二进制码的调制所示。

 待发射的二进制编码(注意是未调制的)
注意上面的一组二进制编码并非完整的NEC编码!完整的NEC协议编码长度为110ms,即剩余的是低电平,大约40ms左右,怎么算的呢?9+4.5+16*2.24+16*1.12 = 67.26,110 - 67.26 = 42.74(有的是108 - 67.26 =40.74)。
如果我们一直按着键不放,会产生什么效果呢?如下图:
待发射的二进制编码(注意是未调制的)
注意上面的一组二进制编码并非完整的NEC编码!完整的NEC协议编码长度为110ms,即剩余的是低电平,大约40ms左右,怎么算的呢?9+4.5+16*2.24+16*1.12 = 67.26,110 - 67.26 = 42.74(有的是108 - 67.26 =40.74)。
如果我们一直按着键不放,会产生什么效果呢?如下图:

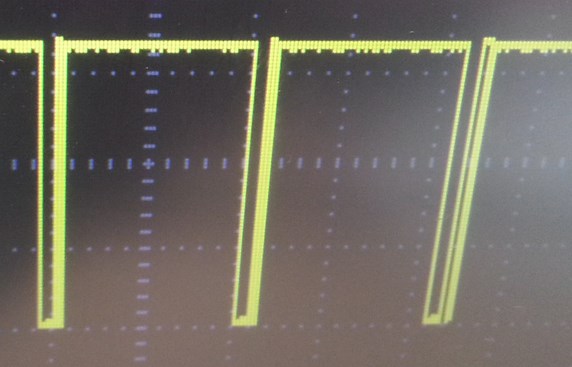 上面这一些称为重复码,以110ms为周期的重复码,如下图:
上面这一些称为重复码,以110ms为周期的重复码,如下图:
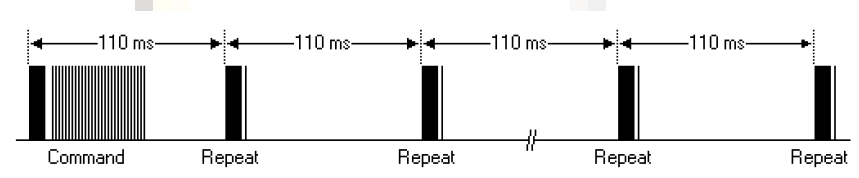
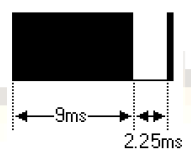
就是说,发了一次命令码之后,不会再发送命令码,而是每隔110ms时间,发送一段重复码。重复码由9ms高电平和2.25ms的低电平以及560us的高电平组成。如下图:
因为HS0038B接收频率是38KHz,约26us,记住这个不是高电平的时间长度,这个是一个脉冲的时间长度也就是一个周期,例如我们利用一个中断产生38K脉冲,占空比是1/2,我们的中断时间就要设置为 1/38000/2 S中断一次,然后通过相隔一次中断电平翻转一次就形成了一个频率为38K占空比1/2的脉冲。所以在编程时,每两次中断的间隔时间为26/2us即13us。由上面可以知道,要发射9ms高电平+4.5ms低电平的前导码,由于高电平的发射要产生的是38KHz的脉冲,所以在每次中断中反转输出形成38KHz的脉冲,而低电平的发射只需要将引脚电平拉低即可,这样接收端接收到38KHz的信号则可知接收到的是高电平,而没有接收到38KHz则认为接收到的是低电平。
红外接收头只接受38K信号(误差范围内),我们把接收头看出一个转换器。遇到38K就输出低电平,没有遇到38K就被上拉成高电平。于是所谓的“编码”的概念就这样产生了,我们利用有38K信号 跟 没有38K信号 这两种状态,利用红外接收头就翻译成低电平、高电平的信号。这就是最主要的东西。
class="linenums" style="padding-left: 0px;">
-
/***********************定时器0中断处理 **********************/
void timeint(void) interrupt 1
{
TH0=0xFF;
TL0=0xF3; //设定时值为38K*2 也就是每隔13us中断一次
count++;
if (flag==1) //如果是发射“1”,则产生38K信号
{
OP=~OP;
}
else //如果是发射“0”,则单纯拉低电平,不产生38K信号
{
OP = 0;
}
ir_in= OP;
}
//发送9ms的起始码
endcount=692;
flag=1;
count=0;
do{}while(count<endcount);
/**********************发送4.5ms的结果码***********************/
endcount=346;
flag=0;
count=0;
do{}while(count<endcount);
解调
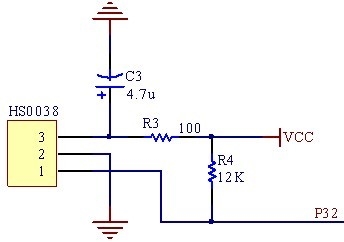
红外接收需先进行解调,解调的过程是通过红外接收管进行接收的。其基本工作过程为:当接收到调制信号时,输出低电平,否则输出为高电平, 是调制的逆过程(图 5 解调)。HS0038 是一体化集成的红外接收器件,直接就可以输出解调后的高低电平信号;红外接收器 HS0038 的应用电路(图6)。
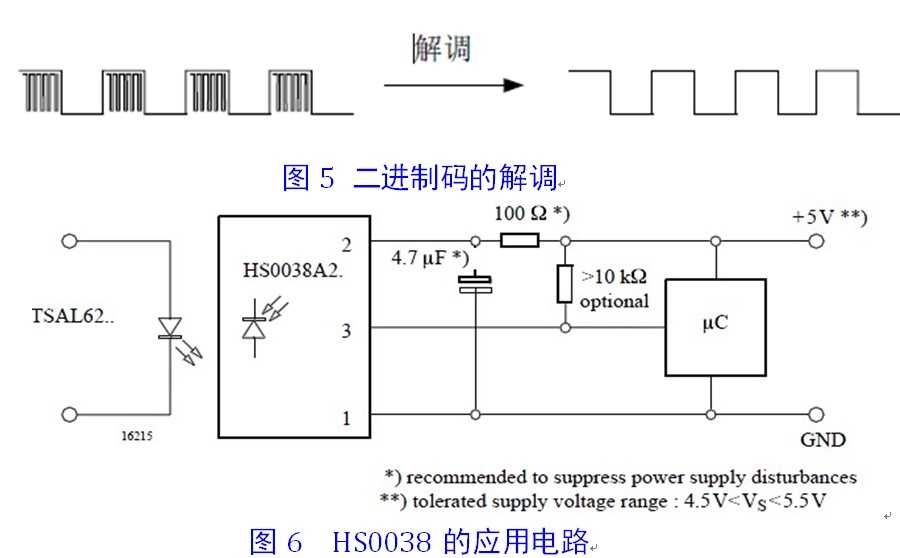
发送方的电平跟接收方解调出来的电平是反向的。
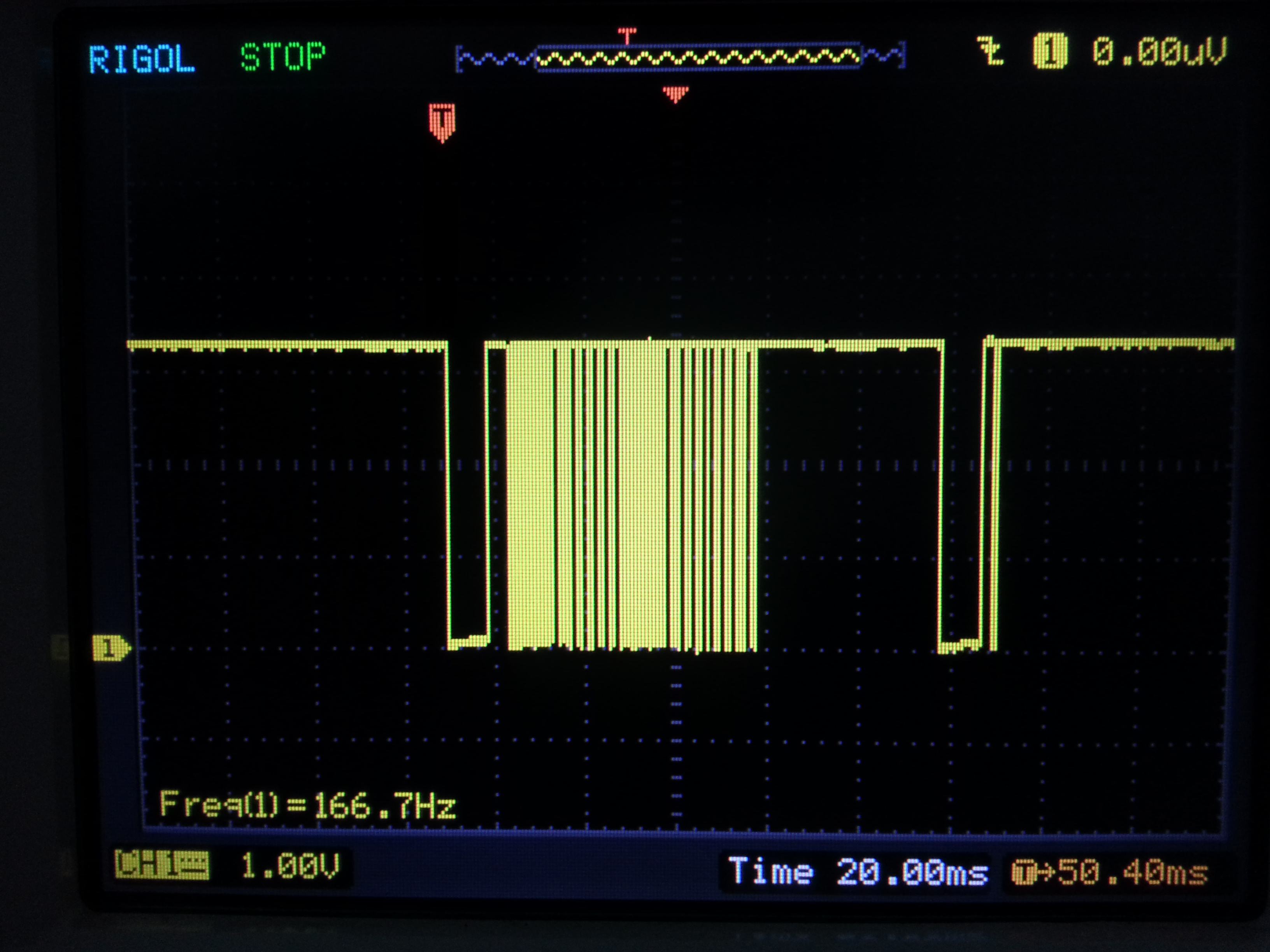
红外接收头接收到遥控器的信号后,解码出后的数据格式如下:写程序即根据这个信号的格式来写。

接收到的信号经过HS0038B解调后得到一系列的高低电平,即遥控码,分为3部分:
前导码:9ms的低电平+4.5ms的高电平(和发射的时候相反)
用户码:区别不同的红外设备
操作码:8bit操作码和8bit的操作反码组成
0和1均以0.56ms的低电平开始(实际测量是500us的样子),不同的是后面出现的高电平,
如果高电平是0.56ms(实际测量是500us的样子),则表示0,如果高电平是1.68ms(0.56*3=1.68)则表示1
写代码的时候只需要检测高电平的时间即可。
以下时间都是通过示波器实际测量所得。
引导码的高电平:4.5ms
0的高电平 :0.56ms(实测0.5ms的样子)
1的高电平 :1.68ms
重复码的高电平:2.1ms
重复码前的高电平:40ms
//获取高电平时间函数伪代码,返回几微妙
Get_Pulse_Time()
begin
time = 0
while HS0038B数据引脚的电平为高电平
time = time + 1
延时20微妙
//time等于250,即延时了5ms
if time == 250
return time*20
return time*20
end
红外接收函数采用中断函数,通过边沿触发启动高电平时间检测,比较即时准确。
//红外中断函数伪代码,frame_data、frame_cnt、frame_flag为全局变量
EXTI15_10_IRQHandler()
begin
pulse_time = 0
leader_code_flag = 0 /* 引导码标志位,当引导码出现时,表示一帧数据开始 */
irda_data = 0 /* 数据暂存位 */
while 1
if 红外接收头数据引脚的电平 == 高电平
//获取高电平时间
pulse_time = Get_Pulse_Time()
//>=50ms 不是有用信号 当出现干扰或者连发码时,也会break跳出while(1)循环
if( pulse_time >= 50ms
break;
//0.56ms:低电平0
if pulse_time > 0.2ms and pulse_time < 1ms
irda_data = 0
//1.68ms:高电平1
else if pulse_time > 1ms and pulse_time < 2ms
irda_data = 1
//4.5ms:前导位
else if pulse_time > 4ms and pulse_time < 4.5ms
leader_code_flag = 1
//2.1ms:连发码,在第二次中断出现,40ms:16位操作码后的高电平时间,位于重复码之前
else if (pulse_time > 2ms and pulse_time < 4ms) or (pulse_time > 36ms and pulse_time < 44ms)
frame_flag = 1; /* 一帧数据接收完成 */
frame_cnt++; /* 按键次数加1 */
break
//在第一次中断中完成
if leader_code_flag == 1
frame_data <<= 1
frame_data += irda_data
frame_cnt = 0
清除中断标志
end
-
//获取操作码函数伪代码
IrDa_Process()
begin
first_byte = frame_data >> 24
sec_byte = (frame_data>>16) & 0xff
tir_byte = frame_data >> 8
fou_byte = frame_data
// 清标志位
frame_flag = 0;
if (first_byte==~sec_byte) && (first_byte== 用户码)
if tir_byte ==~fou_byte )
return tir_byte
return 0; /* 错误返回 */
end
-
//main函数里使用红外伪代码
while 1
if( frame_flag == 1 ) /* frame_flag为全局变量,一帧红外数据接收完成 */
key_val = IrDa_Process()

 参考链接:
参考链接:
http://www.cnb
logs.com/yulongchen/archive/2013/04/12/3017409.html
http://www.geek-workshop.com/thread-2322-1-1.html
http://www.cnblogs.com/heiyue/p/3333019.html
http://blog.sina.com.cn/s/blog_533074eb0100xlhl.html
http://www.geek-workshop.com/thread-3564-1-1.html
本文链接:http://www.cnblogs.com/cposture/p/4321293.html

![[原创]EF架构随心所欲打造属于你自己的DbModel](/Upload/SmallIMG/2015030722/49402FA5DAA3FA87.png)



