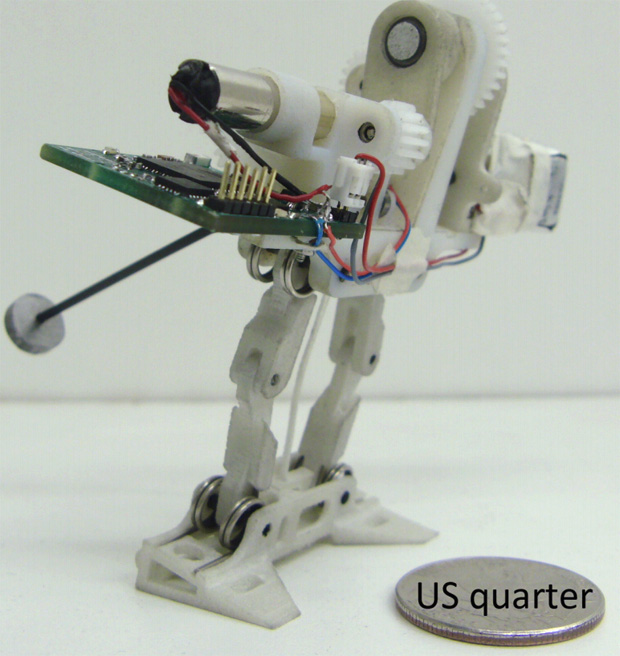
������Ъ��������ѧ��ʿ�� Jianguo Zhao ��ͬ���� 2011 ����Ƶ�����Ծ�����˸������������ӡ��������һ���������ʮ������ij�����ϣ������˾��ܸı䷽�ָ�ƽ�Ⱥͽ�����Ծ�����ڣ��о���Ա��������Ծ�����ˣ���������һ��β�ͣ������СС���������ڿ���ȷ��������������ֻ�� 26 �ˣ��� 7.5 ���ף��� 75 ������������ 80 ���ߣ��ܲ��ٶȿɴ� 4 cm/s��
�����о���Ա�����ģ�PDF������ 11 �¾��е� IROS 2013 ����Ϲ�����







