
�������˿Ƽ�����Ⱥ
�������˼�ʻ�����Ŀ�����ʷ�����ݵ� 1939 �꣬�����˼�ʻ����������Ҳ���ǽ�������¡�����˹�����ȸ衢ƻ����ʼ���ٵ����ֳ�����ҵ�����������ٶ�Ϊ�����������Ӷ�Ҫ�ڷ�������չʾһ�����˵綯�������˹���������ƣ���δ�������������һ��Υ����Ϊ��
��������ʵ�ڴ����˼�ʻ������������˼�ʻ�Ժܶ�����˵����һ������ʵ����——���ݽ�����������Э��(AAA)�ĵ�����ʾ�����ķ�֮�����ܷ��߳��Լ����³������˼�ʻ��������ǰ��ʱ�����˹�����˼�ʻ�����¹ʣ��Լ�����ǰ���й���˹�������в��¼����Ӿ����������˼�ʻ��ȫ�������ɡ����˼�ʻ��δ������������ߣ������ƺ���������Զ��һ�㡣
�������˼�ʻ��Ŀɿ�������֮�£���Ȼ���˲��������˼�ʻ���黳���ڽ��� 8 �·���������ҵ�ܿ�����ר���У��ȸ����˼�ʻ��Ŀ����Լ��·������Ŀ�(John Krafcik)�������ǣ���˹���ļ���ֻ�ǰ��Զ����˼�ʻ����������ȫ�Զ����˼�ʻ�ǿ��Ա����¹ʵġ��������������˽�ȸ����˼�ʻ�����ݽ�ʷ֮�ͻ�������������Ŀ�˵�IJ���Ϊ���˼�ʻ�绤����������һ������˹��������������ȫ��ȫ�Զ����˼�ʻδ����
�������˼�ʻ����Ҳ�Ƿָߵ͵�
���������һ������“���˼�ʻ”��������ʱ����Ҳ���������������龰��һ������������Զ�����·���ڶ��������ڷ������ϵ����������ֻ������������������飬������˹�������������ϵĶ�ͼһ����

һ����˹���������Զ�Ѳ��ʱ���ֻ�
����ʵ���ϣ����˼�ʻ�ĸ���ܿ��������ƶ�������ϵͳ(ABS)�����������������˼�ʻ������ABS ���ڳ���һ��γ��ı����ã����ڸ���������һ�����ǵ�Ҳ����ʵ�֡�
���ǵϸ�����������
������������Щֻ��������Եͼ������˼�ʻ����������������ҵ��һ�㶨�壬���˼�ʻ���ĸ��Σ����е������������ڼ�ʻԱ��ص�ǰ�����ڶ�ʱ���ʱ�����Զ�������ʻ���൱�ڰ��Զ����˼�ʻ�����Ľ��������ʻԱ��أ�����ʵ��ȫ�Զ����˼�ʻ��
����֪�������˼�ʻ�����ķ��࣬���Ǿ��ܶ���˹���ȸ�����˼�ʻ������ξ��и������ˡ���˹�������˼�ʻ���� Autopilot ���Զ���Ѳ����Ҳ�����Զ������90 ����ƻ��ϵ�������ϷҲֻ����Ҫ��ٿر����������˹�������������ʡ�ˡ�
90 ����ƻ��ϵ�������Ϸ
��������������Ϸ�����ע��Ҳ��ײ�������ο���ʵ�ļ�ʻ����˹����ξ�ʾ���������� Autopilot ����Ҫ��ʻԱ��ʱ��صģ�������ȫ���Ρ���������˵��һ�㶨�壬���ּ��������Զ���ʻ�ĵ����Σ�Ҳ���ǰ��Զ������˼�ʻ��
�����ȸ�ԭ����Ŀ��Ҳ�ǵ����Ρ�2012 ����ǰ���ȸ����˼�ʻ��Ŀ����Ƹ���˹�����ƣ������ǰ��Զ����˼�ʻ�������и�˾��ʱ��ע��������Է�����б��ʱ���ܹ��ӹ�����������һ����������Ա��ص����������Ϊ�ˣ��ȸ�������˹ RX450h ���в��ԣ��о���Ա��ԭ�г��ͻ����Ͻ��и��죬��װ�״���⡢������������ͷ�� GPS �豸��������ʱ���ܿ�����������¼������Ĵ����豸��װλ�á�
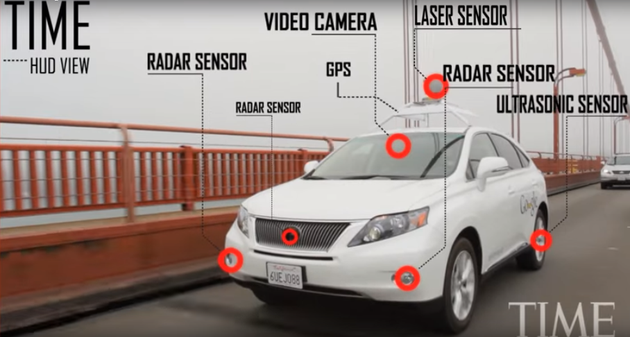
������ʱ���ܿ�����¼�Ĺȸ�������˳������豸��װλ��
������ 2013 �꣬�ڶԹȸ�Ա��������ѵ���������ð��Զ����˼�ʻ�����°�ʱ���з���Ա���������⣺˾���ڹȸ���Եİ��Զ����˼�ʻ��������ʱ�̱���ע������������ʻ�п��ֻ���ת���ñʼDZ����Եİ���Ƶ�����������кܶ��������˳���ʻ�д������ȸ���뷨��ȫ�෴��
�����ȸ���ʶ�������˼�ʻ�����ε�֢���������ϣ��˲��������������Զ���ʻ��ʱ�̱��ֶ���ʻ�ļ�ء����Թȸ�����������Զ����˼�ʻ���ȫ�Զ������˴�������ʻ����ȫ�������������˼�ʻ���ĽΡ������ǵ������У����������ǵij��ϣ�ֻҪ���߳���ȥ�ľͿ����ˣ�ʣ�µ�һ�н���������
�����뷨�ܺã����ǹȸ���ôȷ����ȫ��
������ʶ�����˼�ʻ�����ε����⣬�ȸ�ת�����ȫ�Զ����˼�ʻ��������2014 �꣬�ȸ����������е�ȫ�Զ����˼�ʻԭ�ͳ����˿����ϳ��Ժ�ԭ���������λ����һ����ť���棬�˿�ֻ�谴�°�ť���Ϳ���ȥ��ȥ�ĵط���

��һ�°�ť�����˳����Զ���ʻ
�������ӽṹͼ�Ͽ����ȸ�ȫ�Զ����˳�������Բ������Ϊ�˽���������ⷶΧ�����ȴ�ͳ���ͣ��ȸ�ȫ�Զ����˳�ȥ���������������ٿصIJ��֣����緽���̺��ƶ�̤�壬��Ϊ���ø��ָ����Ĵ��������������⡢�״��������ͷ������������Χ���еķ����ϵ����塣���������Ŀ���˵���������ȸ�ϣ����û���˲ٿص�����£�������ʻ���Ը���ȫ��

�ȸ�ȫ�Զ����˳��豸��װͼ
������֤������ʻ��ȫ�Ĺؼ����ڴ������ϡ��ȸ�ȫ�Զ����˳�ͨ����Щ��������֪��Χ���������ȱ�������ڵ�λ�ã������Χ�����壬Ԥ����Χ���������ʲô�����ж�������پ�����ʻ�켣�Լ��ٶȡ��ڼ��֮�£�����������������г�������·�����ˡ���������֦�����Ա����˳���������ͨ��������Ϣ������Ӧ��Ӧ��
�ȸ�ȫ�Զ����˳���ǰ�����г������Ҽ����ٶ�
�������⣬�ȸ�ȫ�Զ����˳����ڸ���·���ͼ��˻����½��в��ԣ���֤�ռ����������·�����������ݡ�

�ȸ�ȫ�Զ����˳��ڵ�����ƽ��·����в���
�����ȸ�Ϊ�˽�һ����֤��ȫ����ȫ�Զ����˳�����ʻ�ٶ��趨��ÿСʱ 25 Ӣ��(ԼÿСʱ 40 ����)���൱�ڱ����θɵ���������١�������ʻ�ٶȹ������ȸ����˳���·���������������¹���

�ȸ�ȫ�Զ����˳���Ϊ�ٶȹ�������������
�����ȸ�����������������Ҳע�ⰲȫ��Ϊ�����̶ȵر������ˣ�����ʦ���ڳ����ⲿ�����˺�����ĭ���������粣���IJ��ʸij������ϡ�
�����ȸ���Զ���ʻ����ȱ��
����Ŀǰ���ȸ�ȫ�Զ����˳��������ĸ��ݽ������飬�г̳��� 150 ��Ӣ��(ԼΪ 241 ����)����ֵ��ע����ǣ��ȸ�ȫ�Զ����˳�����·���������������� 13 �����¹ʣ����������������ڹȸ����ϣ������¹ʸ�����һ���������������ȸ�ȫ�Զ����˼�ʻ�İ�ȫ�̶Ȼ��Ǻܸߡ�
����Ȼ��ȫ�Զ����˼�ʻ��ĿǰҲ������ʵ�֡������һ�������������е���������ȫ�Զ����˼�ʻ������֮�以�ཻ����������Ч�����¹ʣ�������³ç��˾���������ڡ���ʹ���˼�ʻ������ȫ���ؽ�ͨ����Ҳ���ܹ���ȫ�����¹ʡ����⣬ȫ�Զ����˳��漰�˹����������Ի�����һ����������������˵��������˼�ʻ��������·��������·����� 5 �����ӣ����Dz���Ӧ��Ϊ�˶� 5 �����Ӷ�ѡ�����е���ײ��һ�����ˣ�
�����������˼�ʻ����δ������ʲô�������⣬������Ŀ˶�ȫ�Զ����˳�������һֱ���ᶨ�������� LinkedIn ��ҳ�ϣ����˼��������һ�λ���ȫ��ÿ���� 120 �������ڽ�ͨ�¹ʣ�95% ���¹�����Ϊ��ʧ��������Ҫ���ø��á�Ҳ���ڿ�Ԥ����ij�죬����ȫ�Զ����˼�ʻ��Ŀ����ڽ����¹ʷ������ø��ã�����Ŀǰ�����������ģ����ǿ���ʱ��С�ģ�С�ģ���С�ġ�









