using System; using System.Collections.Generic; using System.Linq; using System.Text; using System.Threading.Tasks; using Microsoft.Kinect; using System.Windows; using System.Windows.Controls; using System.Windows.Media; using System.Windows.Shapes; using System.Timers; namespace DEV { public class KinectHelper { #region 成员 //体感设备 private KinectSensor kinectDriver; //骨架数据 private Skeleton[] frameSkeletons; //姿势库 private readonly Brush[] _SkeletonBrushes = new Brush[] { Brushes.Black, Brushes.Crimson, Brushes.Indigo, Brushes.DodgerBlue, Brushes.Purple, Brushes.Pink }; Window minWindow; bool isOK = false; bool isKinectControl = false; double MoveX; double MoveY; double Zoon; Vector4 handLeft2; Vector4 handRight2; Timer KinectTimer; #endregion 成员 #region 构造函数 public KinectHelper(KinectSensor kin, Window win) { try { kinectDriver = kin; if (kinectDriver != null) { minWindow = win; //设置平滑参数 TransformSmoothParameters smoothParameters = new TransformSmoothParameters(); // 设置处理骨骼数据帧时的平滑量,接受一个0-1的浮点值,值越大,平滑的越多。0表示不进行平滑。 smoothParameters.Smoothing = .5f; // 接受一个从0-1的浮点型,值越小,修正越多 smoothParameters.Correction = .9f; // 抖动半径,单位为m,如果关节点“抖动”超过了设置的这个半径,将会被纠正到这个半径之内 smoothParameters.JitterRadius = 0.05f; // 用来和抖动半径一起来设置抖动半径的最大边界,任何超过这一半径的点都不会认为是抖动产生的,而被认定为是一个新的点。该属性为浮点型,单位为米 smoothParameters.MaxDeviationRadius = 0.1f; kinectDriver.SkeletonStream.Enable(smoothParameters); kinectDriver.SkeletonFrameReady += kinectDriver_SkeletonFrameReady; frameSkeletons = new Skeleton[kinectDriver.SkeletonStream.FrameSkeletonArrayLength]; kinectDriver.Start(); } KinectTimer = new Timer(); KinectTimer.Interval = 4000; KinectTimer.Elapsed += KinectTimer_Elapsed; } catch (Exception ex) { System.Windows.MessageBox.Show(ex.Message); } } void KinectTimer_Elapsed(object sender, ElapsedEventArgs e) { if (isOK == false) { isOK = true; } else { isOK = false; } } /// <summary> /// 体感设备捕捉到骨架事件 /// </summary> /// <param name="sender"></param> /// <param name="e"></param> void kinectDriver_SkeletonFrameReady(object sender, SkeletonFrameReadyEventArgs e) { try { using (SkeletonFrame fram = e.OpenSkeletonFrame()) { if (fram == null) return; (this.minWindow.FindName("mess") as TextBlock).Text = "骨架流开始了"; fram.CopySkeletonDataTo(frameSkeletons); //获取第一位置骨架 Skeleton skeleton = GetPrimarySkeleton(frameSkeletons); if (skeleton != null) { ProcessPosePerForming2(skeleton); } for (int i = 0; i < frameSkeletons.Length; i++) { DrawSkeleton(this.frameSkeletons[i], this._SkeletonBrushes[i]); } } } catch (Exception ex) { System.Windows.MessageBox.Show(ex.Message); } } #endregion #region 方法 /// <summary> /// 获取第一位置骨架 /// </summary> /// <param name="frameSkeletons">骨架流</param> /// <returns></returns> private Skeleton GetPrimarySkeleton(Skeleton[] frameSkeletons) { Skeleton ske = null; try { for (int i = 0; i < frameSkeletons.Length; i++) { if (frameSkeletons[i].TrackingState == SkeletonTrackingState.Tracked) { if (ske == null) { ske = frameSkeletons[i]; (this.minWindow.FindName("mess") as TextBlock).Text = "捕捉到骨架了"; } else { if (ske.Position.Z > frameSkeletons[i].Position.Z) { ske = frameSkeletons[i]; } } } } } catch (Exception ex) { System.Windows.MessageBox.Show(ex.Message); } (minWindow.FindName("mess") as TextBlock).Text = "捕捉到骨架"; return ske; } /// <summary> /// 空间坐标和界面二维坐标转换 /// </summary> /// <param name="joint"><关节/param> /// <param name="offset"></param> /// <returns></returns> public Point GetJointPoint(Joint joint, Point offset) { //得到节点在UI主界面上的空间位置 DepthImagePoint point = kinectDriver.CoordinateMapper.MapSkeletonPointToDepthPoint(joint.Position, kinectDriver.DepthStream.Format); point.X = (int)(point.X - offset.X); point.Y = (int)(point.Y - offset.Y); return new Point(point.X, point.Y); } /// <summary> /// 计算2骨骼之间的角度 /// </summary> /// <param name="centerJoint">中心关节点</param> /// <param name="angleJoint">角度关节点</param> /// <returns></returns> public double GetJointAngle(Joint centerJoint, Joint angleJoint) { double angel = 0; double a, b, c; Point primaryPoint = GetJointPoint(centerJoint, new Point()); Point angelPoint = GetJointPoint(angleJoint, new Point()); Point pr = new Point(primaryPoint.X + angelPoint.X, primaryPoint.Y); try { a = Math.Sqrt(Math.Pow(primaryPoint.X - angelPoint.X, 2) + Math.Pow(primaryPoint.Y - angelPoint.Y, 2)); b = primaryPoint.X; c = Math.Sqrt(Math.Pow(angelPoint.X - pr.X, 2) + Math.Pow(angelPoint.Y - pr.Y, 2)); double angelRed = Math.Acos((a * a + b * b - c * c) / (2 * a * b)); angel = angelRed * 180 / Math.PI; if (primaryPoint.Y < angelPoint.Y) { angel = 360 - angelRed; } } catch (Exception ex) { System.Windows.MessageBox.Show(ex.Message); } return angel; } /// <summary> /// 通过3个关节点计算角度 /// </summary> /// <param name="leftJoint">边关节</param> /// <param name="centerJoint">中心关节</param> /// <param name="rightJoint">边关节</param> /// <returns></returns> public double GetJointAngle(Joint leftJoint, Joint centerJoint, Joint rightJoint) { double angel = 0; double a, b, c; Point primaryPoint = GetJointPoint(leftJoint, new Point()); Point angelPoint = GetJointPoint(centerJoint, new Point()); Point pr = GetJointPoint(rightJoint, new Point()); try { a = Math.Sqrt(Math.Pow(primaryPoint.X - angelPoint.X, 2) + Math.Pow(primaryPoint.Y - angelPoint.Y, 2)); b = Math.Sqrt(Math.Pow(angelPoint.X - pr.X, 2) + Math.Pow(angelPoint.Y - pr.Y, 2)); c = Math.Sqrt(Math.Pow(pr.X - primaryPoint.X, 2) + Math.Pow(pr.Y - primaryPoint.Y, 2)); double angelRed = Math.Acos((a * a + b * b - c * c) / (2 * a * b)); angel = angelRed * 180 / Math.PI; if (primaryPoint.Y > angelPoint.Y) { angel = 360 - angelRed; } } catch (Exception ex) { System.Windows.MessageBox.Show(ex.Message); } return angel; } /// <summary> /// 将捕捉到的人体的空间坐标(3维)点转换为计算机界面坐标(2维) /// </summary> /// <param name="joint">人体关节</param> /// <returns></returns> private Point GetJointPoint(Joint joint) { Grid layoutRoot = (minWindow.FindName("mian") as Grid); DepthImagePoint point = this.kinectDriver.CoordinateMapper.MapSkeletonPointToDepthPoint(joint.Position, kinectDriver.DepthStream.Format); point.X *= (int)layoutRoot.ActualWidth / kinectDriver.DepthStream.FrameWidth; point.Y *= (int)layoutRoot.ActualHeight / kinectDriver.DepthStream.FrameHeight; return new Point(point.X, point.Y); } /// <summary> /// 获取关节的4维坐标 /// </summary> /// <param name="joint">关节</param> /// <returns></returns> private Vector4 GetJointVector4(Joint joint) { Vector4 v4 = new Vector4(); Grid layoutRoot = (minWindow.FindName("mian") as Grid); DepthImagePoint point = this.kinectDriver.CoordinateMapper.MapSkeletonPointToDepthPoint(joint.Position, kinectDriver.DepthStream.Format); point.X *= (int)layoutRoot.ActualWidth / kinectDriver.DepthStream.FrameWidth; point.Y *= (int)layoutRoot.ActualHeight / kinectDriver.DepthStream.FrameHeight; v4.X = point.X; v4.Y = point.Y; v4.Z = joint.Position.Z; return v4; }KinectHelp
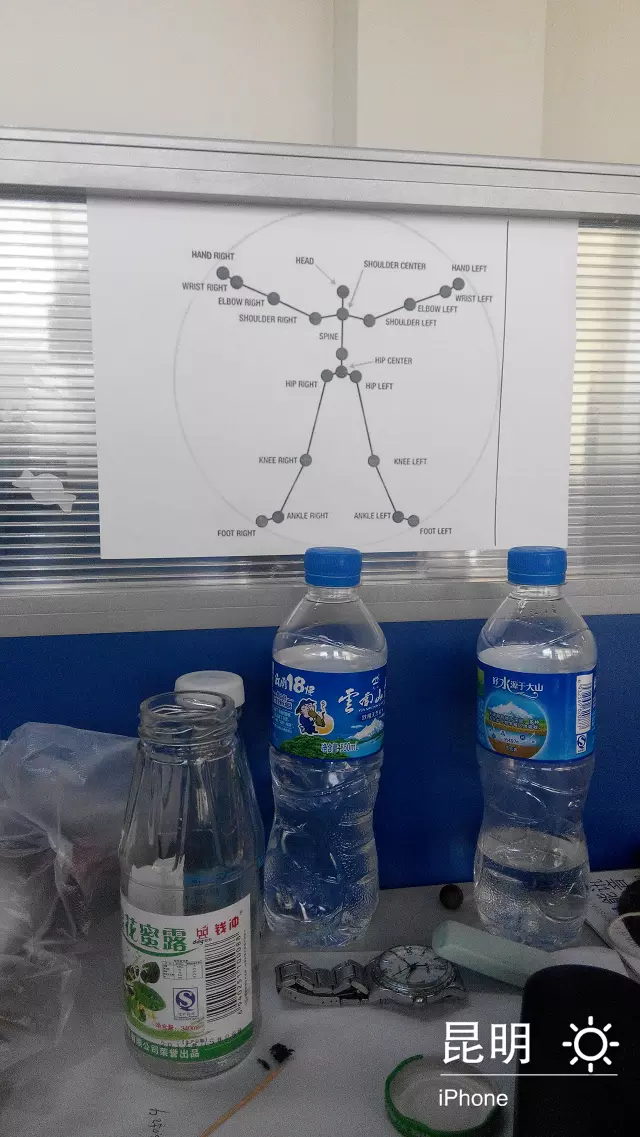
Kinect 关节对应
姿势判断

/// <summary> /// 根据人体各种姿态的生理数据判断姿态 /// 通过关节之间角度,关节之间的相关位置判断姿态 /// </summary> /// <param name="sk">骨架数据</param> private void ProcessPosePerForming2(Skeleton sk) { string mess = ""; //T型姿态 //double angelLeft = GetJointAngle(sk.Joints[JointType.ElbowLeft],sk.Joints[JointType.ShoulderLeft]); //double angelRight = GetJointAngle(sk.Joints[JointType.ElbowRight],sk.Joints[JointType.ShoulderRight]); #region 获取数据 double angelLeft = GetJointAngle(sk.Joints[JointType.ShoulderLeft], sk.Joints[JointType.ElbowLeft], sk.Joints[JointType.WristLeft]); double angelRight = GetJointAngle(sk.Joints[JointType.ShoulderRight], sk.Joints[JointType.ElbowRight], sk.Joints[JointType.WristRight]); //胸关节空间位置 Vector4 shoulderCenter = GetJointVector4(sk.Joints[JointType.ShoulderCenter]); Vector4 handLeft = GetJointVector4(sk.Joints[JointType.HandLeft]); Vector4 handRight = GetJointVector4(sk.Joints[JointType.HandRight]); Vector4 spine = GetJointVector4(sk.Joints[JointType.Spine]); double leftCentZ = Math.Round((shoulderCenter.Z - handLeft.Z), 2); double rightCenterZ = Math.Round((shoulderCenter.Z - handRight.Z), 2); double leftAndRightX = Math.Round(Math.Abs((handRight.X - handLeft.X)), 2); double leftAndRightY = Math.Round(Math.Abs((handRight.Y - handLeft.Y)), 2); #endregion #region 姿势判断 //T型姿势 if (leftAndRightX >= 750 && leftAndRightY <= 10 && isOK == false) { mess = "T型姿势"; KinectTimer.Start(); isKinectControl = true; (minWindow.FindName("gridMainMenu") as Grid).Visibility = Visibility.Collapsed; (minWindow.FindName("gridPose") as Grid).Visibility = Visibility.Visible; (minWindow.FindName("gridTuch") as Grid).Visibility = Visibility.Collapsed; if ((this.minWindow as MainMenu).mainWindow != null) { (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("执行内部函数,funReset"); } } else //左手举起,右手放下 if (leftAndRightY > 200 && handLeft.Y < handRight.Y && isOK) { mess = "左手举起,右手放下"; (minWindow.FindName("gridMainMenu") as Grid).Visibility = Visibility.Collapsed; (minWindow.FindName("gridPose") as Grid).Visibility = Visibility.Collapsed; (minWindow.FindName("gridTuch") as Grid).Visibility = Visibility.Visible; } else //右手举起,左手放下 if (leftAndRightY > 200 && handLeft.Y > handRight.Y && isOK) { mess = "右手举起,左手放下"; } else //双手交叉 if ((handRight.X - handLeft.X) < 0 && handLeft.Y < 150 && handRight.Y < 150 && isOK) //handLeft.Y<spine.Y&&handRight.Y<spine.Y { mess = "双手交叉"; KinectTimer.Stop(); isKinectControl = false; (minWindow.FindName("gridMainMenu") as Grid).Visibility = Visibility.Visible; (minWindow.FindName("gridPose") as Grid).Visibility = Visibility.Collapsed; (minWindow.FindName("gridTuch") as Grid).Visibility = Visibility.Collapsed; if ((this.minWindow as MainMenu).mainWindow != null) { (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("执行内部函数,funReset"); (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("执行内部函数,GUI_FUNC_225_鼠标左键按下"); } } else //双手高举 if ((angelRight >= 350 && angelRight <= 380) && (angelLeft >= 350 && angelLeft <= 380)) { mess = "双手高举"; } #endregion #region 测试用例 (minWindow.FindName("leftX") as TextBlock).Text = "左手X:" + handLeft.X; (minWindow.FindName("leftY") as TextBlock).Text = "左手Y:" + handLeft.Y; (minWindow.FindName("leftZ") as TextBlock).Text = "左手Z:" + handLeft.Z; (minWindow.FindName("rightX") as TextBlock).Text = "右手X:" + handRight.X; (minWindow.FindName("rightY") as TextBlock).Text = "右手Y:" + handRight.Y; (minWindow.FindName("rightZ") as TextBlock).Text = "右手Z:" + handRight.Z; (minWindow.FindName("centerX") as TextBlock).Text = "中心X:" + shoulderCenter.X; (minWindow.FindName("centerY") as TextBlock).Text = "中心Y:" + shoulderCenter.Y; (minWindow.FindName("centerZ") as TextBlock).Text = "中心Z:" + shoulderCenter.Z; //(minWindow.FindName("leftAndCenter") as TextBlock).Text = "(脊椎Y-左手Y)=:(" + spine.Y + "-" + handLeft.Y + ")=" + Math.Round((spine.Y - handLeft.Y), 2); //(minWindow.FindName("rightAndCenter") as TextBlock).Text = "(脊椎Y-右手Y)=:(" + spine.Y + "-" + handRight.Y + ")=" + Math.Round((spine.Y - handRight.Y), 2); //(minWindow.FindName("leftAndCenter") as TextBlock).Text = "(中心Z-左手Z)=:(" + shoulderCenter.Z + "-" + handLeft.Z + ")=" + Math.Round((shoulderCenter.Z - handLeft.Z), 2); //(minWindow.FindName("rightAndCenter") as TextBlock).Text = "(右手Z-中心Z)=:(" + shoulderCenter.Z + "-" + handRight.Z + ")=" + Math.Round((shoulderCenter.Z - handRight.Z), 2); //(minWindow.FindName("rightAndRightX") as TextBlock).Text = "(左手X-右手X)=:(" + handRight.X + "-" + handLeft.X + ")=" + Math.Round((handRight.X - handLeft.X), 2);//Math.Round(Math.Abs((handRight.X - handLeft.X)), 2); //(minWindow.FindName("rightAndLeftY") as TextBlock).Text = "(左手Y-右手Y)绝对值=:(" + handRight.Y + "-" + handLeft.Y + ")=" + Math.Round(Math.Abs((handRight.Y - handLeft.Y)), 2); //(minWindow.FindName("leftCenterY") as TextBlock).Text = "(中心Y-左手Y)绝对值=:(" + shoulderCenter.Y + "-" + handLeft.Y + ")=" + Math.Abs(Math.Round((shoulderCenter.Y - handLeft.Y), 2)); //(minWindow.FindName("rightCenterY") as TextBlock).Text = "(中心Y-右手Y)绝对值=:(" + shoulderCenter.Y + "-" + handLeft.Y + ")=" + Math.Abs(Math.Round((shoulderCenter.Y - handLeft.Y), 2)); (minWindow.FindName("els") as Ellipse).Width = Math.Abs((handRight.X - handLeft.X)); (minWindow.FindName("els") as Ellipse).Height = Math.Abs((handRight.Y - handLeft.Y)); (minWindow.FindName("mess") as TextBlock).Text = mess; #endregion #region 判断姿势执行函数 string function = ""; bool isSheck = true; if (handRight2 == null) { handRight2 = handRight; } #region 计算平滑度 double maxX; double maxY; (minWindow.FindName("rightAndCenter") as TextBlock).Text = "(右手X1-是右手X2)=:(" + handRight.X+ "-" + handRight2.X + ")=" + Math.Abs((handRight.X - handRight2.X)); (minWindow.FindName("rightAndLeftY") as TextBlock).Text = "(左手Y1-右手Y2)绝对值=:(" + handRight.Y + "-" + handRight2.Y + ")=" + Math.Abs((handRight.Y - handRight2.Y)); maxX = Math.Abs((handRight.X - handRight2.X)); maxY = Math.Abs((handRight.Y - handRight2.Y)); if (maxX > 3 || maxY>3) { isSheck = false; (minWindow.FindName("leftCenterY") as TextBlock).Text = "滑动了"; } else { (minWindow.FindName("leftCenterY") as TextBlock).Text = "抖动"; isSheck = true; } #endregion //左手控制 if (isKinectControl && leftCentZ > 0.4 && rightCenterZ < 0.4) { double movX = MoveX - handLeft.X; double movY = MoveY - handLeft.Y; if ((this.minWindow as MainMenu).mainWindow != null) { if (movX < 0)//向右 { (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("相机移动控制, 0, 3"); } else if (movX > 0)//向左 { (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("相机移动控制, 0, 4"); } if (movY > 0)//向上 { (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("相机移动控制, 0, 1"); } else if (movY < 0)//向下 { (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("相机移动控制, 0, 2"); } } function = "右手控制地图移动X方向:" + handRight.X + "右手控制地图移动Y方向:" + handRight.Y; MoveY = handLeft.Y; MoveX = handLeft.X; function = "左手控制地图移动X方向:" + handLeft.X + "左手控制地图移动Y方向:" + handLeft.Y; } //右手控制 if (isKinectControl && leftCentZ < 0.4 && rightCenterZ > 0.4 && !isSheck) { (minWindow.FindName("moveX") as TextBlock).Text = "手移动X" + MoveX + "-" + handRight.X + "=" + (MoveX - handRight.X).ToString(); (minWindow.FindName("moveY") as TextBlock).Text = "手移动Y" + MoveY + "-" + handRight.Y + "=" + (MoveY - handRight.Y).ToString(); double movX = MoveX - handRight.X; double movY = MoveY - handRight.Y; if ((this.minWindow as MainMenu).mainWindow != null) { if (movX < 0)//向右 { (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("执行内部函数,funReset"); (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("相机移动控制, 0, 3"); } else if (movX > 0)//向左 { (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("执行内部函数,funReset"); (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("相机移动控制, 0, 4"); } if (movY > 0)//向上 { (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("执行内部函数,funReset"); (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("相机移动控制, 0, 1"); } else if (movY < 0)//向下 { (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("执行内部函数,funReset"); (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("相机移动控制, 0, 2"); } } function = "右手控制地图移动X方向:" + handRight.X + "右手控制地图移动Y方向:" + handRight.Y; MoveY = handRight.Y; MoveX = handRight.X; } if (isKinectControl && leftCentZ < 0 && rightCenterZ < 0) { function = "地图复位"; } //地图缩放 if (isKinectControl && leftCentZ < 0 && rightCenterZ > 0) { function = "地图缩放右手控制:" + rightCenterZ; } if (isKinectControl && leftCentZ > 0 && rightCenterZ < 0) { function = "地图缩放左手控制:" + rightCenterZ; } //双手X放大 if (isKinectControl && leftCentZ > 0 && leftCentZ < 0.3 && rightCenterZ > 0 && rightCenterZ < 0.3 && leftAndRightX > 300 && !isSheck) { if ((this.minWindow as MainMenu).mainWindow != null) { if (MoveX - leftAndRightX > 0)//缩小 { string fun1 = "设置相机只能水平移动, 0"; string fun2 = "相机移动控制, 0, 2"; // (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("执行内部函数,funReset"); (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript(fun1); (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript(fun2); } if (MoveX - leftAndRightX < 0)//放大 { string fun1 = "设置相机只能水平移动, 0"; string fun2 = "相机移动控制, 0, 1"; // (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("执行内部函数,funReset"); (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript(fun1); (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript(fun2); } } (minWindow.FindName("moveX") as TextBlock).Text = "双手放大X" + MoveX + "-" + leftAndRightX + "=" + (MoveX - leftAndRightX).ToString(); MoveX = leftAndRightX; } //双手Y放大 if (isKinectControl && leftCentZ > 0 && leftCentZ < 0.3 && rightCenterZ > 0 && rightCenterZ < 0.3 && leftAndRightY > 100 && !isSheck) { function = "地图放大双手控制Y:" + leftAndRightX; if ((this.minWindow as MainMenu).mainWindow != null) { if (MoveY - leftAndRightY > 0)// 缩小 { string fun1 = "设置相机只能水平移动, 0"; string fun2 = "相机移动控制, 0, 2"; // (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("执行内部函数,funReset"); (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript(fun1); (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript(fun2); } if (MoveY - leftAndRightY < 0)//放大 { string fun1 = "设置相机只能水平移动, 0"; string fun2 = "相机移动控制, 0, 1"; // (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("执行内部函数,funReset"); (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript(fun1); (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript(fun2); } } (minWindow.FindName("moveY") as TextBlock).Text = "双手缩放Y" + MoveY + "-" + leftAndRightY + "=" + (MoveY - leftAndRightY).ToString(); MoveY = leftAndRightY; } //双手放大 if (isKinectControl && leftCentZ > 0.4 && rightCenterZ > 0.4 && leftAndRightY > 80 && !isSheck) { if ((this.minWindow as MainMenu).mainWindow != null) { string fun1 = "设置相机只能水平移动, 0"; string fun2 = "相机移动控制, 0, 1"; // (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("执行内部函数,funReset"); (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript(fun1); (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript(fun2); } function = "地图缩小控制X:" + leftAndRightY; } //双缩小 if (isKinectControl && leftCentZ > 0.4 && rightCenterZ > 0.4 && leftAndRightX > 600) { if ((this.minWindow as MainMenu).mainWindow != null) { string fun1 = "设置相机只能水平移动, 0"; string fun2 = "相机移动控制, 0, 2"; // (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript("执行内部函数,funReset"); (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript(fun1); (this.minWindow as MainMenu).mainWindow.VRPControl.ExecuteVrpScript(fun2); } } (minWindow.FindName("ctiveInfo") as TextBlock).Text = function; #endregion handRight2 = handRight; } /// <summary> /// 绘画人体当前骨架 /// </summary> /// <param name="skeleton">骨架数据</param> /// <param name="brush">画笔</param> private void DrawSkeleton(Skeleton skeleton, Brush brush) { Grid SkeletonsPanel = (minWindow.FindName("SkeletonsPanel") as Grid); SkeletonsPanel.Children.Clear(); if (skeleton != null && skeleton.TrackingState == SkeletonTrackingState.Tracked) { //绘制头部和躯干部 Polyline figure = CreateFigure(skeleton, brush, new[] { JointType.Head, JointType.ShoulderCenter, JointType.ShoulderLeft, JointType.Spine, JointType.ShoulderRight, JointType.ShoulderCenter, JointType.HipCenter, JointType.HipLeft, JointType.Spine, JointType.HipRight, JointType.HipCenter}); SkeletonsPanel.Children.Add(figure); //绘画左脚 figure = CreateFigure(skeleton, brush, new[] { JointType.HipLeft, JointType.KneeLeft, JointType.AnkleLeft, JointType.FootLeft }); SkeletonsPanel.Children.Add(figure); //画右脚 figure = CreateFigure(skeleton, brush, new[] { JointType.HipRight, JointType.KneeRight, JointType.AnkleRight, JointType.FootRight }); SkeletonsPanel.Children.Add(figure); //h画左臂 figure = CreateFigure(skeleton, brush, new[] { JointType.ShoulderLeft, JointType.ElbowLeft, JointType.WristLeft, JointType.HandLeft }); SkeletonsPanel.Children.Add(figure); //画右臂 figure = CreateFigure(skeleton, brush, new[] { JointType.ShoulderRight, JointType.ElbowRight, JointType.WristRight, JointType.HandRight }); SkeletonsPanel.Children.Add(figure); } } /// <summary> /// 根据人体骨架绘制多线段 /// </summary> /// <param name="skeleton">骨架数据</param> /// <param name="brush">画笔</param> /// <param name="joints">关节</param> /// <returns>多线段</returns> private Polyline CreateFigure(Skeleton skeleton, Brush brush, JointType[] joints) { Polyline figure = new Polyline(); figure.StrokeThickness = 18; figure.Stroke = brush; for (int i = 0; i < joints.Length; i++) { figure.Points.Add(GetJointPoint(skeleton.Joints[joints[i]])); } return figure; } #endregion } }View Code









