 class="topic_img" alt=""/>
class="topic_img" alt=""/>
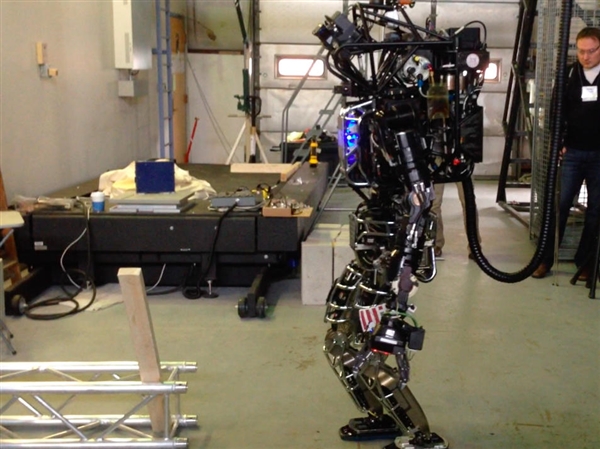
目前,一个来自美国麻省理工大学的机器人专家团队正在加班加点的对一款名为“Atlas”的机器人进行最后的准备,他们希望这一身高 6 尺 2 英寸的机器人能够完成诸如自己爬楼梯、开门,甚至驾驶汽车等复杂任务。而且,他们已经决定让 Atlas 参加于 2014 年底举办的美国国防部 DARPA 机器人挑战赛。
据悉,Atlas 主要由谷歌此前收购的机器人工程技术厂商 Boston Dynamics 负责制造。而美国国防部旗下高级研究计划局(DARPA)每年举办的 ARPA 机器人挑战赛则一直被外界视作是机器人领域的奥林匹克。在比赛中,参赛机器人经常被要求完成爬楼梯、连接消防管道或者打开阀门这些动作以测试它们的移动性、操作能力、感知能力以及机器人操作平台的有效性。
显而易见的是,一款无法实时感知真实世界状况的机器人肯定无法很好的完成这些任务。因此,我们不妨不通过谷歌放出的一段 Atlas 演示视频截图了解一下有关这款高科技机器人的更多信息:
图注:在演示视频中,Atlas 被要求完成找到一个木块,并将其捡起的任务。
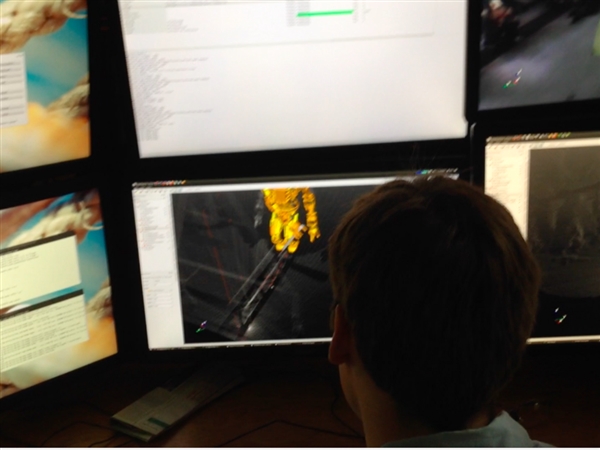
这是 Atlas 操作者的主要操作环境,操作者可以在这里向 Atlas 传输指令,而许许多多不同的屏幕则可以为操作者提供 Atlas 能够看到和检测到物体的实时反馈。

这是 Atlas 通过头部激光障碍识别系统(LIDAR)所看到的景象,该技术主要通过向周边环境发射镭射激光,然后根据这些激光的反馈方式进行分析才得出的周边环境图像。据工作人员介绍称,这一技术的精确度非常高,且会同时向三个方向发射激光。如果你仔细看图片的话你会看到 Atlas 脚下有一条绿色和一条黄色的指示线,这实际上就是 Atlas 所作出的移动路线决策,而它的最终目的就是拿到最远端的那根钢梁。

Atlas 总共拥有两个“立体接近相机”(stereo proximity cameras)以及一个位于头部、微微向下的第三相机,而图中便是 Atlas 三个相机所构成的一副全景图片。
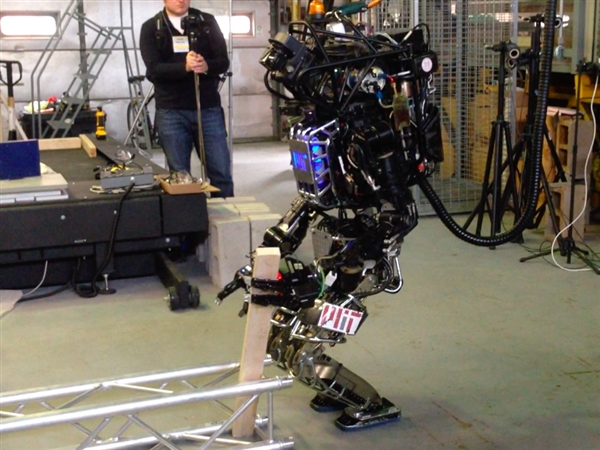
正是以上这些系统的存在使得 Atlas 能够完成诸多依赖于周边环境的复杂任务,比如分辨目标物体、接近目标以及捡起目标物体等任务。
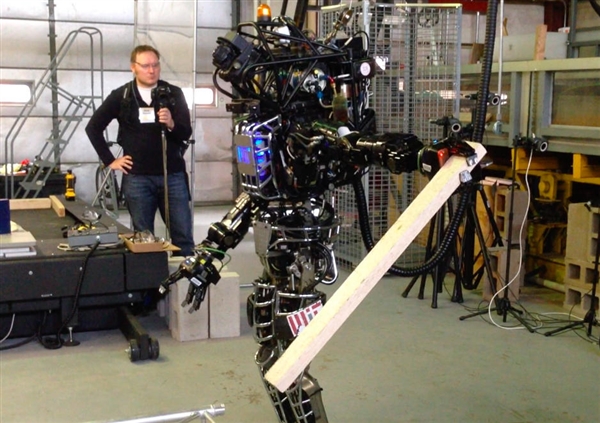
Atlas 最终成功完成任务。





