����iStruct ���κ�����Գ�����˸��ӵ���֫ϵͳ���� 43 ��ѹ�����������У�������Ϊδ����ԽңԶ���DZ����̽�ռҡ�

����1. �����Ȼ������ɵ¹��˹������о����ĺͲ���÷��ѧ���Ͽ���������������ʽ���Ӵ��ŵ����ƣ�ʹ��һ�״��������ź��ؽڵľ�ȷ�˶���
������һ�����˵������Դ������ѧ����һ���Ƚ���ƽ����˶�ϵͳ���û����˿���ƽ�ȵ�ǰ�������ˡ����к�б����

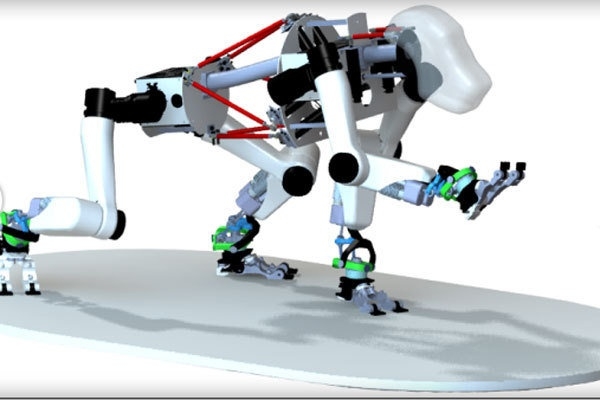
����2. ��ͼΪ�������ؽ�װ�ƺʹ��д������Ľŵ���д��ͷ����������ѧ�����Ժܴ�̶�����������֫�ź��ؽڵĽṹ��
�����Ÿ����о��봫������������������������ִ�������������ͺܶ�������������

����3. �˹������о�����ͼ����ʾ�Ļ����˷���С����ơ�

����4. �������켹�ʹ��д������Ľŵ�����Գ�����˲���ͼ�������˴������ı�ʾ������������“̫�ջ�����”�о������һ���֣�̫�ջ�������Ŀ�����ڿ���̽������������ܻ����ˡ�

����5. ���ڼ�����Ƕ���˵����豸������ṹ��ʵ��һ������Ť�ش�������
����6. ͼΪ�з������еĻ����˼����� CAD ��ͼ��








